2014年7月14日 ロボットが「歩き方」によって人の感情を認識可能と証明
『歩き方』によって人の感情を認識可能と証明
~感情認識ロボットの飛躍的な機能進化に期待~
国立大学法人中国竞彩网大学院工学研究院先端機械システム部門 ベンチャー?ジェンチャン准教授と、筑波大学サイバニクス研究センター 門根秀樹 助教は、フランスのコレージュ?ド?フランス Alain Berthoz名誉教授と共同で、人の歩行データ(歩き方)から個々の感情特性を抽出?作製したモデルを用いて、数学的に感情認識が可能であることを明らかにしました。これによって、定量的に人の感情を予測できる可能性が示唆されました。概要は、以下のとおりです。
背景:人は、声のトーンや顔の表情の変化から、相手が今どのような感情であるのか認識していると言われていますが、「歩き方」も同様に、感情を認識するための1つの要素として考えられています。HRI(ヒューマン?ロボット?インタラクション)の分野では、ロボットが日常の生活空間の中で活躍するために「感情」に関する研究が進められています。従来はロボットが『音』と『顔』を認識して感情を推定するのが主流でしたが、本研究では「歩き方」に着目し、世界で初めて歩き方による感情認識の定量的な調査を行いました。
研究体制:本研究は、中国竞彩网のベンチャー?ジェンチャン准教授、筑波大学の門根秀樹 助教(研究当時の所属はコレージュ?ド?フランス)とコレージュ?ド?フランスのアラン?ベルトーズ名誉教授が共同で実施しました。
研究成果:本研究では、実際の歩行から得たデータをモデル化して、感情認識に影響を与えるパラメータを調査し(下記①)、得られた結果を基にデータベースを構築し作製した感情認識アルゴリズムを用いて、感情認識の可能性を検証しました(下記②)。
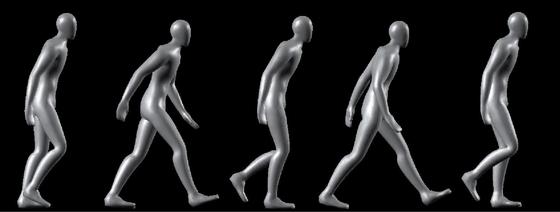
①歩き方動作のうち何に基づき感情を認識しているのか、被験者20人を対象に実験を行いました。4人の演者が5種類の感情(喜怒哀楽恐)を表現した動作をアバター変換で作製したヒューマンモデル(図1)を使って、被験者がどのように感情を認識するか調べました。その結果、速度と姿勢を変化させることにより、被験者が認識する感情が変化しました。これによって、速度、姿勢など特定のパラメータが感情認識に影響を与えることが示唆されました。
②上記結果に基づき感情認識アルゴリズムを作製し、パラメータ(速度、頭や胴体の姿勢)の重み付けを変えてバリエーションを付加し、感情認識の成功率を検証しました。その結果、特定のパラメータが感情認識に大きく影響を与えることが明らかになりました。本研究により、全体の動作ではなく一部の動きを見るだけで感情を認識できることが示されました。
今後の展開: 今後、より複雑かつ多様な感情認識の可能性を検証していくため、より多くの動作データを蓄積してさらなる研究を進めます。本研究成果によって、例えばロボットが近づいてきた人の感情を歩き方で認識し、感情を先読みしてコミュニケーションをとるなど、従来の感情認識ロボットに比して飛躍的な機能進化が期待されます。
筑波大学ホームページ(別リンクで開きます)
※
本研究成果は、6月25日付電子版International Journal of Social Robotics(別リンクで開きます)に掲載されました。